Lab 5: Linear PID and Linear Interpolation
Lab 5: Linear PID and Linear Interpolation
Prelab
BLE Debugging Infrastructure
The robot runs PID control entirely on the Artemis. A computer sends a PID_START command over BLE with a duration (e.g. 3000ms). The Artemis executes the PID loop at full speed, storing timestamped debug data in circular buffers. Once the duration expires, the controller stops the motors and waits. The computer then sends SEND_PID_DATA to retrieve all logged samples over BLE.
Each sample contains nine fields: timestamp, ToF measurement, error, PWM target, left motor output, right motor output, and the P/I/D branch outputs. All values are stored as integers in circular buffers of 256 entries.
times.push((int)(micros()));
measurement.push(distance);
error_buf.push((int)(setpoint - distance));
motor_out.push(pwm);
motor_left.push((int)(motors::current_left));
motor_right.push((int)(motors::current_right));
p_buf.push((int)(controller.p_out));
i_buf.push((int)(controller.i_out));
d_buf.push((int)(controller.d_out));
A 500ms motor watchdog on the Artemis stops the motors if no control update arrives, providing a hard stop safety mechanism independent of BLE.
BLE Gain Tuning
Separate BLE commands (PID_GAINS, PID_PARAMS, PID_SETPOINT) update gains, integrator limits, derivative filter constant, and deadband without reflashing.
P/I/D Discussion
Controller Selection
I chose a PD controller (Kp=0.75, Ki=0, Kd=0.15). The proportional term handles the primary drive toward the setpoint. The derivative term damps oscillation as the robot approaches the wall. An integrator was unnecessary because the deadband offset already forces the motors past static friction, and the proportional gain is sufficient to eliminate steady-state error at 304mm.
Gain Selection
The ToF sensor returns distances up to ~1300mm in short mode. At a starting distance of 0mm (error = 304mm), the proportional term alone produces 0.75 * 304 = 228. After adding the deadband offset of 80, the output saturates at PWM 255. This means the robot drives at full power for most of the approach and only begins to modulate near the setpoint.
I started with Kp alone and increased it until the robot reached the wall aggressively. Then I added Kd to damp the overshoot. Increasing Kd beyond 0.15 caused the robot to slow too early, while lower values allowed oscillation around the setpoint.
Sensor Configuration
TOF Range and Sampling Time
I used short distance mode. Short mode has a maximum range of ~1.3m, which is sufficient for short tests. Short mode provides faster update rates than long mode.
The ToF sensor is read in a non-blocking state machine. Each loop iteration checks checkForDataReady() and only reads when data is available. This avoids blocking the main loop.
PID Implementation
Control Loop
The PID loop runs every main loop iteration. It calls tof::methods::current1() which returns an extrapolated distance estimate. If no ToF data is available yet, it returns -1 and the loop skips that iteration. The PID output is negated because a positive error (robot is too far) should produce forward motion (negative ToF direction).
int distance = tof::methods::current1();
float output = -controller.compute((float)distance, setpoint);
int pwm = to_pwm(output);
motors::methods::set(pwm, pwm);
Deadband Handling
The to_pwm() function maps the PID output to motor PWM. It adds the deadband offset (80) to any nonzero output so that the motors always receive enough voltage to move:
static int to_pwm(float output) {
if (output > 0)
return constrain((int)output + deadband, 0, PWM_MAX);
else if (output < 0)
return constrain((int)output - deadband, -PWM_MAX, 0);
return 0;
}
PID Controller
I wrote a reusable PID class in lib_PID.h. It tracks dt internally via micros() and exposes the P, I, and D branch outputs for logging:
float compute(float measurement, float setpoint = 0) {
long now_us = micros();
bool first = (prev_time == -1);
if (first) prev_time = now_us - 1;
float error = setpoint - measurement;
long dt_us = now_us - prev_time;
float dt = dt_us * 1e-6f;
// Proportional
p_out = kP * error;
// Integral with wind-up protection
if (integrator_range == 0 ||
(-integrator_range < error && error < integrator_range)) {
integral += error * dt;
integral = constrain(integral, -integrator_cap, integrator_cap);
} else {
integral = 0;
}
i_out = kI * integral;
// Derivative on measurement (avoids derivative kick)
if (first) {
d_out = 0;
d_filter.reset();
d_filter.filter(0);
} else {
float raw_derivative = (prev_measurement - measurement) / dt;
d_out = kD * d_filter.filter(raw_derivative);
}
prev_error = error;
prev_measurement = measurement;
prev_time = now_us;
return p_out + i_out + d_out;
}
Derivative Smoothing
The raw derivative is smoothed through a first-order low-pass filter with RC = 0.02s.
Linear Extrapolation
Extrapolation Function
The ToF sensor updates at roughly 50Hz. The PID loop runs much faster. Between sensor updates, the extrapolate() function projects the current distance using the slope of the two most recent readings:
float slope = (float)(dists[0] - dists[1]) / (float)dt;
int extrapolated = dists[0] + (int)(slope * (float)elapsed);
The function includes two safety checks: if the direction of motion reverses (last two slopes have opposite signs), it returns the most recent reading instead of extrapolating. If more than 500ms has elapsed since the last reading, it also returns the raw value.
Results
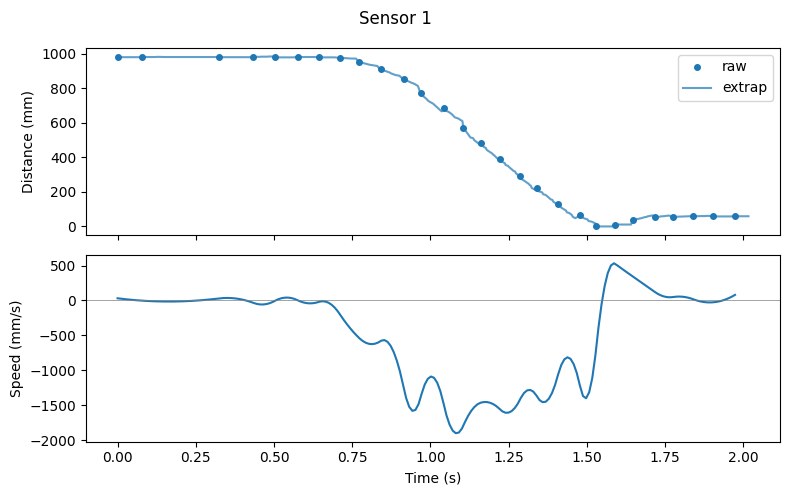
Speed
The front ToF sensor data shows the robot reaches a maximum approach speed of approximately 1500 mm/s during the forward run. The following plot shows the distance derivative computed from the ToF readings:
Plots
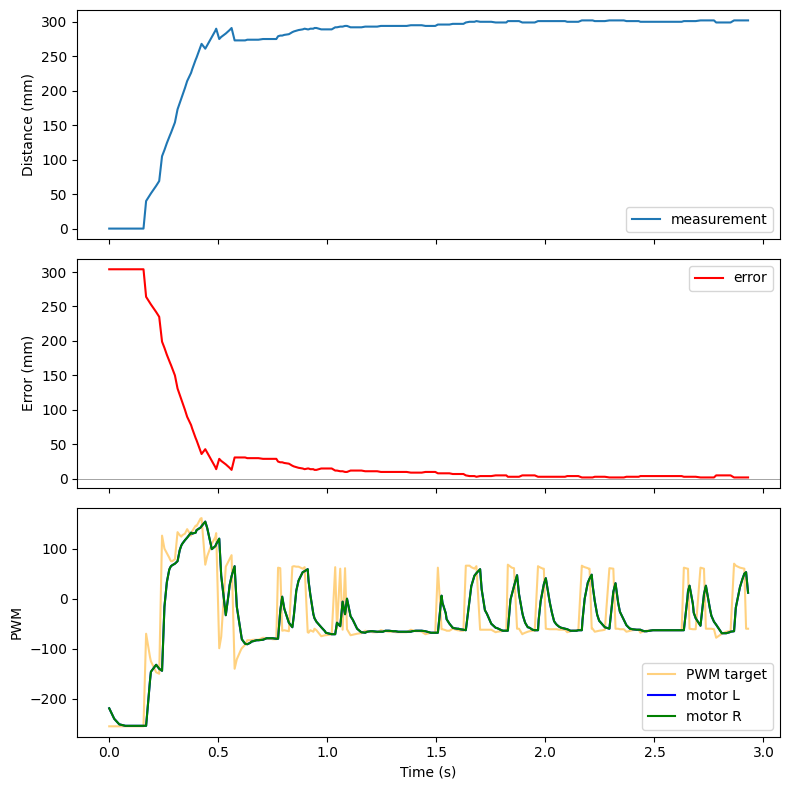
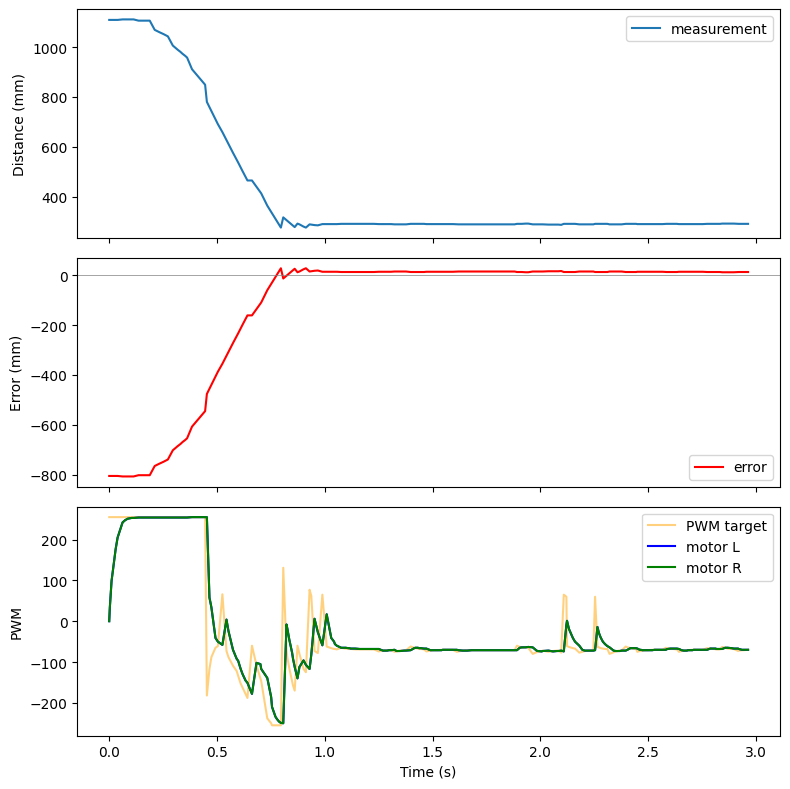
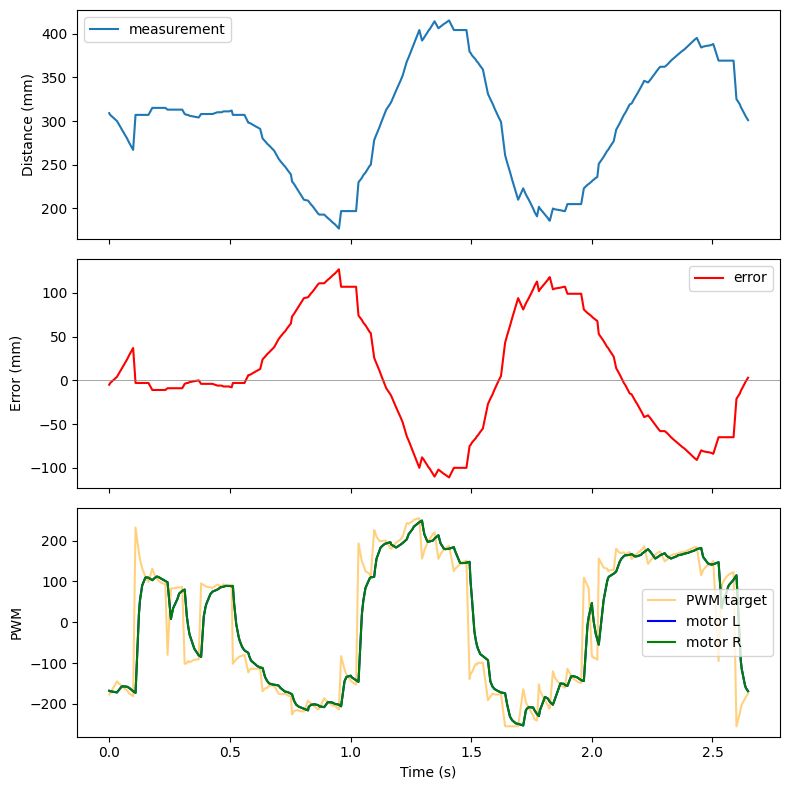
The following plots show three PID runs. Each plot has three subplots: ToF distance vs. time, error vs. time, and motor PWM vs. time. The setpoint is 304mm (1 foot).
Forward approach from ~1.2m:
Perturbation test (foot moving back and forth):
The robot tracks a foot moving toward and away from it, maintaining the 304mm setpoint distance.
Starting close to the wall, driving backward to setpoint: